2014年机器人“蜕变”技术盘点
更新时间:2015-01-27
随着科技的不断发展,曾经遥不可及的机器人已不再是镜花水月。当年变形金刚风靡一时的盛况还在记忆中依稀未远,而今超仿真机器人及各种拟人化机器人已竞相出现,似乎预示着影视作品中人与机器人相融的社会已指日可待。机器人作为人类的重要“伙伴”,正在快速成长,逐渐步入现实的生活和工作中。
2014年10月底到11月初,在日本东京设计周上,在一个名为“超级机器人展”的活动单元中,设计师向参观者展示了很多有趣的机器人:会弹吉它的机器人、会歌唱的机器人、会踢足球的机器人等。
其中来自大阪大学的超仿真机器人安苏娜(Asuna)制作精美,声音动听,拥有着优质硅材料制造的类似真人的细腻皮肤。同时,得益于电子动物肌肉的运用,其灵活的双眼和丰富的面部表情让人流连忘返,吸引了很多参观者纷纷邀请其合拍留影。甚至有观众称,安苏娜将是一个“廉价的约会对象”。此后,安苏娜还将在一个剧院模拟歌手表演。日本A-Lab公司首席执行官三田刚史说:“我们会将安苏娜打造成国际流行偶像。”他认为,与人类无法区分开的、完全独立的超仿真机器人有望10年内出现。
纵观2014年机器人技术的发展历程,一个个新技术的研发如同一颗颗珍珠,串起了机器人技术发展的璀璨珠链,在各个国家的不懈努力下,从头脑、感知、行动、生命特性到社会活动等诸多领域,机器人正进行着从机器到“人”的快速蜕变。许多决定着其未来发展方向的关键性技术取得突破、无数科研成果熠熠生辉。
智能:虚拟大脑,小试牛刀
机器人与机器的不同在于一个“人”字,所以机器人的发展应首重智慧。自然就离不开人工智能。
在人工智能发展早期,学术界和工业界对其前景持有一种过分乐观的态度——这种乐观与其说是对技术的期望过高,倒不如说是当时人们对机器能力的估计实在是过低,以致于当计算机表现出一点点聪明,人们就为之惊叹,而这种惊叹又很容易演化成一种过分的自信。1957年,人工智能(artificial intelligence,AI)的先驱、通用问题求解机的发明者之一赫伯特·西蒙曾说过:“我不是故意让你震惊,但概括来说,现在世界上就已经有了可以思考,可以学习和创造的机器,而且它们的能力还将与日俱增,一直到人类大脑所能够应用到的所有领域。”西蒙当时曾乐观预言,计算机会在10年内成为国际象棋冠军。
然而现实显然比他的预测晚了很多年。在度过了最初的辉煌后,因技术所限,人工智能的研究陷入了长久的沉寂。之后,借助各种新技术和互联网的高速发展,人工智能卷土重来。
相信很多人还记得1997年的5月,由计算机“深蓝”首次战胜国际象棋冠军加里-卡斯帕罗夫所引发的对于人工智能的热议,5月11日那一天 ,是人与计算机挑战史上的重要一天。计算机“深蓝”在正常时限的比赛中首次击败了当时等级分排名世界第一的加里-卡斯帕罗夫,在前五局打平的情况下,卡斯帕罗夫在第六盘决胜局中仅走了19步就向“深蓝”拱手称臣。整场比赛进行了不到一个小时。“深蓝”赢得了那场具有特殊意义的对抗,堪称人工智能发展史上具有里程碑意义的一幕。
此后,2011年2月,在沉寂了10余年后,由IBM和美国德克萨斯大学联合研制的超级电脑“沃森”在美国最受欢迎的智力竞猜电视节目《危险边缘》中以大比分击败该节目历史上两位最成功的选手肯-詹宁斯和布拉德-鲁特,成为该节目新的王者,引发人们的关注。
而在今年夏天,人们再次有幸见证了人工智能领域树起的一块新的里程碑。与传统的人工智能技术不同,Google X终极实验室的虚拟大脑系统无需预先向机器输入某一概念,该系统就能自动从输入的大片数据中“领悟”这一概念,类似人脑的学习过程,意味着人工智能领域对人工干预需求的进一步降低。在今年 6 月份,Google X 虚拟大脑小试牛刀——在没有预先输入“猫”的概念的情况下,Google X利用这个由16000多个处理器、10亿个内部节点组成的虚拟大脑,依托其强大的数据处理功能,分析了1000万帧从Youtube上随机抓取的无标签视频剪辑图片,利用了10天时间,终于“领悟”了什么是猫,并从接下来输入的2万张图片中准确找出了有猫的照片。
Google X的虚拟大脑模拟人脑中一簇簇相互连接、相互沟通、相互影响的“神经元”,形成一个“神经网络”。当此神经网络接收了大量的数据之后,神经元与神经元之间的关系将会发生变化,这种关系的变化使得该系统形成了一大批的“概念”,从而让系统具备了学习能力,能够在新的输入中找出与学到的概念对应的部分,达到识别的效果。
目前,Google 正在将该虚拟大脑用于提升语音识别的准确率。并宣称,就单字错误检出率而言,该系统已让Google的语音识别准确率提升了20%~25%。针对该虚拟大脑技术,加拿大蒙特利尔大学的一位研究机器学习的教授曾表示,人类离人工智能的终极目标又进了一步。
对于人工智能的发展,英国牛津大学未来人类研究所安德斯-桑德伯格博士则心存忧虑,认为必须谨慎看待智能机器人,未来先进的人工智能大脑将会模糊人类与机器人的差别。
然而在涉及到人类自主意识领域时,也有一些有识之士对人工智能提出了质疑,认为人工智能根本无法发展出真正的意识。当前的人工智能发展,更多的是针对某个问题,发展对应的算法和技术,例如图像领域的技术无法直接应用到语言领域。相对而言,人脑具有更强的适用性。
种种议论,不绝于耳。到底仅仅是高级辅助工具,还是能够成为《骇客帝国》中影响甚至威胁人类生存的高智商种族?人们对人工智能最多的讨论,其实更像是对人类自身的探讨。人工智能的存在,在一定程度上而言,或许终将会成为映照人类心灵的一面镜子,虽然现在的虚拟大脑必须依托于数量、体积庞大的硬件系统来实现,智力水平仍然很低,但见微知著,一叶知秋,对于未来人工智能的发展高度和因人类自身意志转移而可能出现的百花齐放的盛景,不妨拭目以待。
触觉:超敏触控,百倍于人
现代机器人的触觉敏感度可以强得超乎想像。
美国麻省理工学院视觉科学学科联合波士顿东北大学研究团队近日成功研制了一种机器人手指触觉传感器GelSight 。
该传感器突破了此前机器人手部关节不灵敏等限制,甚至比人类手指更加灵活敏感,因此受到了各界瞩目。该传感器不是以机器来辨识触觉,而是以3D视觉实时定位物体的方位,以实现对物体的识别和传感。
这种技术比人类的手部触觉灵敏约100倍。GelSight内置有红色、黄色、白色、蓝色等照明设备,GelSight可根据指示的信号迅速做出反应。装置了 GelSight 传感器的机器人可轻松拔出装置在电脑上的USB。
据悉, GelSight 最大的特征在于能够迅速辨识物体的视觉信号,并马上将其转化为触觉信号。
视觉:WiFi“透视”,慧眼识人
2014年8月,来自加利福尼亚大学的研究人员研发出了一种特殊的机器人,他不需要使用任何的传感器,只需要使用WiFi网络就可以看穿墙壁,得到透视眼的能力。
为了达到这个目的,需要两个机器人共同协作,其中一个来向外发出无线信号,在另一端的机器人则会对这些信号进行测试。
当机器人环绕正方形混凝土建筑物时,彼此离开视线范围之内,它们能够计算出建筑物内部的事物,甚至可以识别出人类。
其工作原理是当途经墙壁和其它物体时,测量信号强度的衰减程度。通过测量无线信号的衰减情况,机器人可以绘制一张视觉地图,呈现观测大约100秒的透视景象,如同赋予机器人“透视眼”功能。研究人员指出,这项研究结果非常令人满意,误差不超过5厘米。
当然,这并不是第一个拥有透视眼的机器人,也不会是最后一个,此前的红外热成像、太赫兹探测、数字化定位导航等技术都曾在相关领域被冠以“透视眼”之名,与那些相比,借助WiFi或许会是一个前景广阔的新的创举。
行体:软体机器人更灵活
机器人不全是变形金刚一样的钢筋铁骨,最近,来自美国普渡大学的研究人员就发明了一种由轻质惰性泡沫材料制成的软体机器人,为了让它像机器手臂一样可以自由弯曲,研究人员还在在泡沫材料的表面覆盖了一层特殊的“衣服”,而这层聚合物纤维在受热的情况下可以自由改变形状和坚硬度,作用就如同附着在骨骼上的肌肉一般。
该项目的负责人称,这种能够变形收缩的机械纤维将被广泛用于机器人领域,并计划以此为基础研制新型飞行机器人。另外,由于成本低重量轻,机械纤维机器人十分适合用于太空探索,美国航空航天局已经开始着手研究这类软体机器人。
现代机器人的触觉敏感度可以强得超乎想像。
美国麻省理工学院视觉科学学科联合波士顿东北大学研究团队近日成功研制了一种机器人手指触觉传感器GelSight 。
该传感器突破了此前机器人手部关节不灵敏等限制,甚至比人类手指更加灵活敏感,因此受到了各界瞩目。该传感器不是以机器来辨识触觉,而是以3D视觉实时定位物体的方位,以实现对物体的识别和传感。
这种技术比人类的手部触觉灵敏约100倍。GelSight内置有红色、黄色、白色、蓝色等照明设备,GelSight可根据指示的信号迅速做出反应。装置了 GelSight 传感器的机器人可轻松拔出装置在电脑上的USB。
据悉, GelSight 最大的特征在于能够迅速辨识物体的视觉信号,并马上将其转化为触觉信号。
行动:生物机器人会行走
相信人们还记得,那曾经让无数青年人如醉如痴的霹雳舞,还记得舞蹈中模仿木偶机器人的僵硬的经典动作。而在2014年夏天,美国伊利诺斯大学厄本那香槟分校的工程师们研制成功的“行走型”“生物机器人”却告诉人们,以后机器人的动作不一定是僵硬的,新一代微型生物机器人终于和人类一样拥有肌肉了。
这款微型生物机器人体长不到1厘米,由可伸缩3D打印的水凝胶与身体肌肉细胞组成。其设计灵感来自于肌肉-腱-骨的复杂结构。在3D打印的水凝胶中加入了支架,使其强度足以支撑整个生物机械体,但同时又足够柔韧灵活,可以实现关节的弯曲。由实验室培育的肌肉细胞构成的肌肉条提供动力,每一条肌肉都使用两根支柱固定在支架上,就像肌腱骨连接身体的肌肉一样,但这两根支柱同时还要充当机器人脚的作用。行走速度可以通过调节电刺激的频率来实现控制。研究人员表示这项研究成果将孕育出新一代柔软可弯曲生物机器人。
下一步,研究人员们将继续开展工作,实现对生物机器人运动状态的更大程度操控,如为其植入神经系统,这样生物机器人便能运用光或化学信号实现各种控制。从工程的角度出发,设计者希望能够让生物机器人根据不同的信号做出不同的响应。
繁衍:机器人可按需打印
据报道,未来机器人能够打印新的身体部件,并完美地适应所处环境。日前,挪威奥斯陆大学最新研制了1种3D打印自复制机器人。
许多危险环境非常极端,是人类无法适应和解决的,这个时候自动控制机器人将派上大用场。想像一下这种机器人进入核电站失事地点,它可以开辟一条新的通路。机器人处理复杂地形环境或发生肢体损坏时,会拍照进行分析,他的一条手臂上配备着3D打印机,能够应对不同环境打印出新的部件,或者复制出损坏肢体。
“无论在外太空还是地球上,随着机器人技术的发展,处理的任务难度越来越大,面对各类棘手的情况,机器人要变得独立自主,能自我学习,这也是我们努力的方向。”挪威奥斯陆大学的研究人员正在开发一种新系统,该系统能打印出“定制机器人”,来处理各类任务。目前,他们也开发了一个原型产品Henriette 。
自修复、自适应以及繁衍,这些本是自然赋予生命的特性。很多伤痛,可以因新陈代谢而康复;环境不同,总会想办法去适应;百年终老,却不能阻止新生的繁衍。人类如此,那么,机器人又将如何?短期内,或许只有迅速发展的3D打印技术,才能为其添加这些生命所特有的天赋。
神奇:液态金属“终结者”有望成真
迄今,机器人大多仍是作为一种刚体机器发挥作用,这与现实中人类平滑柔软的外表完全不同。柔性材料控制的发展虽然取得了很大的进步,但距离理想中的结果仍有很大距离。回顾《终结者》中神奇的液态金属机器人,那可以改变外表形状,呈现各种造型,未来色彩极为浓厚的种种不可思议,虽纯属科学幻想,却使人类对机器人的构想有了重大改变。
继去年2月,澳大利亚发现可被分割重组的新型金属液滴,并将其命名为神奇液态金属后,由我国刘静研究员带领的中国科学院理化技术研究所与清华大学联合研究小组,于今年首次发现电场控制下液态金属与水的复合体可在各种形态及运动模式之间发生转换的基本现象,并发表题为Diverse Transformations of Liquid Metals Between Different Morphologies的论文。
论文通过系统的实验,揭示出室温液态金属具有可在不同形态和运动模式之间转换的普适变形能力。比如,浸没于水中的液态金属对象可在低电压作用下呈现出大尺度变形、自旋、定向运动,乃至发生液球之间的自动融合、断裂-再合并等行为,且不受液态金属对象大小的限制;较为独特的是,一块很大的金属液膜可在数秒内即收缩为单颗金属液球,变形过程十分快速,而表面积改变幅度可高达上千倍;此外,在外电场作用下,大量彼此分离的金属液球可发生相互粘连及合并,直至融合成单一的液态金属球;依据于电场控制,液态金属极易实现高速的自旋运动,并在周围水体中诱发出同样处于快速旋转状态下的漩涡对;若适当调整电极和流道,还可将液态金属的运动方式转为单一的快速定向移动。研究表明,造成这些变形与运动的机制之一在于液态金属与水体交界面上的双电层效应。
上述发现使可变形材料特别是液体机器的设计和制造迈出了关键性的一步,从理论和技术层面支持了实现液态金属机器人的可能性。
至今年9月,美国北卡罗来纳州研发出一种可进行自我修复的变形液态金属,距离打造“终结者”变形机器人的目标更进一步。
科学家们使用镓和铟合金合成液态金属,形成一种固溶合金,在室温下就可以成为液态,在不受外力情况下,当这种合金被放在平整桌面上时会形成一个近乎完美的球体。当通过少量电流刺激后,球体表面张力会降低,金属会在桌面上伸展。如果电荷从负转正,液态金属就会重新成为球状。更改电压大小还可以调整金属表面张力和金属块粘度,从而改变结构。
北卡罗来纳州立大学副教授迈克尔·迪基说:“只需要不到一伏特的电压就可改变金属表面张力,这种改变是相当了不起的。我们可以利用这种技术控制液态金属的活动,从而改变天线形状、连接或断开电路等。”
研究人员宣称,该突破有助于建造更好的电路、自我修复式结构,甚至有一天可用来制造《终结者》中的T-1000机器人。
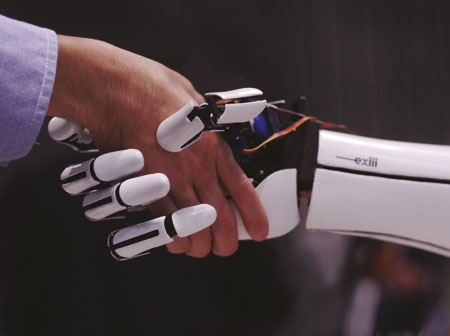
沟通:机器人与人类可交流
2014年10月初,日本电子高新科技博览会上,东芝发布了一款全新人形交互机器人,而其最大特色就是可以通过手语与人交流。
该名为AikoChihira的女性角色机器人关节中内置43个电动机,其肢体运动相当自然流畅,这也让手语表达成为了可能。AikoChihira计划的最终目标是为老人以及老年痴呆症患者提供服务,在陪伴他们的同时还能帮助医护人员或者其亲人进行实时监护。
除了东芝以外,很多科研机构也参与了AikoChihira 计划。来自东南大学机器人传感控制实验室的吴涓教授透露说,该实验室的研究团队已完成了情感交互机器人的初步设计。
该机器人通过提取人的嘴部、眼睛的几十个甚至数百个关键点的数据信号,从而能够非常准确地读懂人的高兴、愤怒、忧伤等种种表情,并将它们模拟出来。通过感觉、触觉的设计,该机器人也能够分辨对它进行的是抚摸还是按压、打击等动作,如果对它抚摸,它会开心地笑,如果对它打压,它则会表现出很忧伤,是个有感情的活生生的机器人。
吴涓分析说,由于目前对于人的情感的科学基础研究还不够,因此目前研究出来的情感交互机器人其实和真人的情感交互还有很大的距离,它只是能够识别一些简单的表情,对于动作的识别也局限于一些固定的动作,但是未来随着人机交互技术的进一步发展,人类和机器人的“情感”交流将会越来越顺畅。
组队:机器人群体的分工协作
随着机器人的发展,大量机器人开始走向工作岗位,如何更好的分工协作也被提上日程。2014年4月,SRI International实验室宣布了其蚁群机器人项目的最新研究成果。
该项目利用了蚂蚁仿生学的概念,可允许多个机器人分工协作完成一项任务,最多能控制超过1000只“蚂蚁”,最小的“蚂蚁”比一枚硬币要小一些。
蚁群机器人擅长的是一些精细工作,比如处理微型电路元件、搬运水滴、促成小规模化学反应的发生。而这些能力使得它可被应用到 DNA 分析、疾病诊断、细胞分析等场景。而且这种方式相比传统手段更加简单、快速、廉价。
无独有偶,时隔数月,哈佛大学的工程师们同样使用1000只组装简易的小型机器人打造了一个机器人版的蜂群,目标直指大部队协同工作,力求可以自行完成复杂任务。
相对于机器人蚁群,以及机器人蜂群的群体实验展示,一个被称为Minibuilders的全新3D打印建筑机器人套件在今年夏天的问世,初步向人们展示了分工协作这一理念的实际应用。
这套系统的核心是1个庞大的主部件,有两个装有液化合成大理石的大型圆筒,大理石经独特的配方制成。气胎注射筒会通过长长的管子推动材料,那些管子将被安置在一个建筑工地上,与3个敏捷的专业附属机器人(地基机器人、抓握机器人、真空机器人)协同工作。
可以肯定的是,在未来建筑机器人领域中,Minibuilders必将扮演一个非常重要的角色。而此后的机器人或许也将作为1个群体,开始尝试新的群体生活。不仅仅是工作,或许在不久的将来,或许有一天,那种电影《机器人总动员》中,清扫型机器人瓦力与女机器人伊芙的甜美爱情故事,真的会在现实中上演。

社长兼主编:陈雪芹
电 话:(010)68515135
编辑部
电 话:(010)68054816/68054837/68054838/68054839
运营部
电 话:(010)68052048
学术稿件咨询电话:
电 话:(010)64936065
新闻投稿邮箱:
zgsbgcxw@126.com
技术文章投稿邮箱:
zgsbgc@126.com
开户行
工行北京礼士路支行
户 名
《中国设备工程》杂志社
账 号
0200 0036 0902 2100 604
地 址
北京市西城区三里河一区12号楼4门3层(100045)